


友情链接:
- 巡视遥测机器人
多旋翼式高光谱遥感机器人
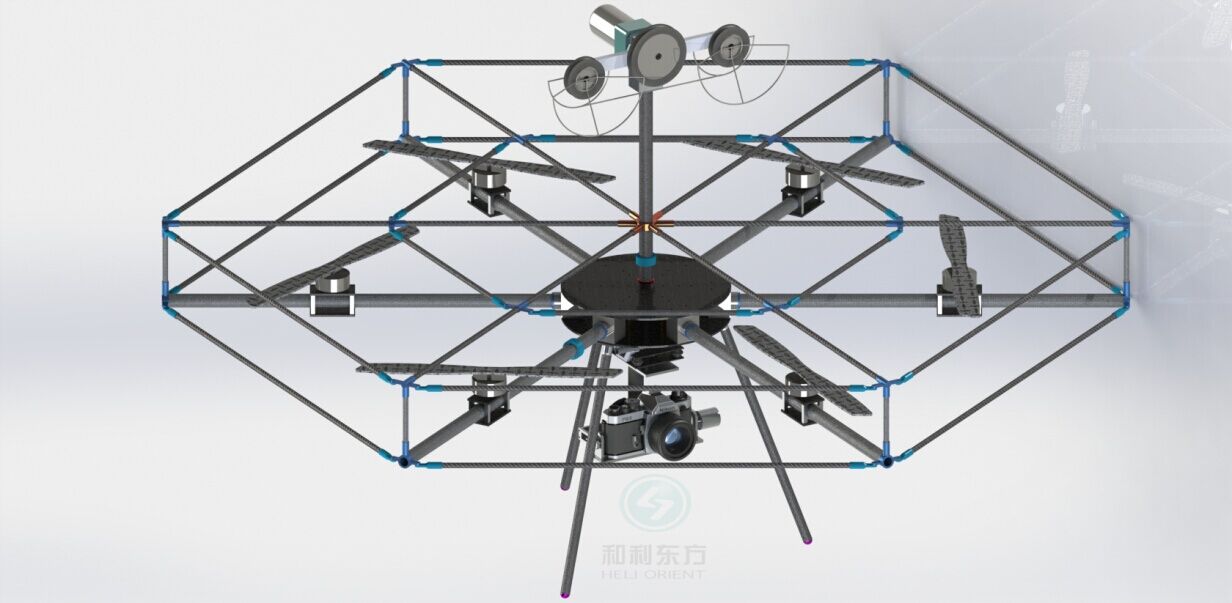


(1)功能简介
多旋翼式飞行机器人,是近年来发展迅速的新型遥感平台。它的体积小、重量轻,制造成本低,可以随身携带;以地面操作员代替空中飞行员,运营维护费用、人力成本远低于有人驾驶飞机。其低廉的费用使得许多中小型用户也有能力支付,扩大了遥感的应用范围和用户群,具有广阔的应用前景。多旋翼式机器人的其它优点有:能够低速、低空飞行,有利于遥感作业;机动灵活;升空准备时间短等。
本产品是多旋翼式机器人遥感监测系统的一部分,利用多旋翼式机器人技术的灵活性、稳定性和易操控性,又利用了遥感仪器的高精度性,使二者有机结合,保证了机器人既能够垂直起降又能够沿特定轨迹飞行,从而克服了两种技术各自的局限性。产品通过机载嵌入式计算机完成了遥感仪器的曝光控制、图像采集、传输、存储、GPS 解码计算、执行远程指令、状态报告等功能。多旋翼式机器人可以装载的遥感仪器种类繁多,有电视摄像机、数码相机、红外传感器、合成孔径雷达、高光谱成像仪、多光谱成像仪等。
(2)技术特点
1) 机器人能够实现沿特定轨迹飞行和遥感数据采集两种功能;
2) 操作员通过无线传输控制指令对机器人进行飞行和悬停控制;
3) 机器人具有无线图传和用来装载遥感仪器的云台装置,从而实现遥感数据采集功能;
4) 飞行时间满载约为8-15分钟;
5) 机器人装载有防撞机构,保证设备的安全;
6) 载荷尽量控制在3-3.5kg ;
7) 机器人无遮挡遥控距离和图传距离约为1km ;
8) 垂直起降,飞行速度5~50Km/h,飞行高度:≤1000米(相对高度);
9) 正常起降风速:≤6级;工作湿度:5%~95%无冷凝;工作温度:-20℃~50℃。
(3)技术参数
产品名称 | 多旋翼式遥感机器人 |
产品型号 | HELIUAV 2.0 |
专利号 | ZL201410096183.1 |
适用范围 | 交通不便的山区野外 |
主桨材料 | 碳纤维 |
启动方式 | 遥控 |
接收机 | Futaba |
供电方式 | 12V锂离子可充电电池*2 |
持续工作时间 | 约15分钟 |
无线数传/图传 | 约2km |
最大载荷 | 3~3.5kg |
电机转速 | 1200—6500 rpm |
线上行走坡度 | < 30度 |
飞行速度 | 5~50km/h |
爬升速度 | 约0.5米/秒 |
线上行走速度 | 1~1.5 km/h |
起飞降落保护 | 半自动 姿态速度控制 |
飞行保护 | 自动悬停 自动飞回出发地 |
最大海拔高度 | 2000米 |
飞行高度 | < 1km |
起降风速 | < 6级 |
使用工作条件 | 环境温度:-15℃~40℃,相对湿度:≤75% 大气压力:86KPa ~ 106KPa |
贮存条件 | 环境温度:-25℃~40℃,相对湿度:≤90% 大气压力:86KPa ~ 106KPa |
整机重量 | 约8kg |
整机尺寸 | 1.5m×1.5m×1.1m |
| 上一篇:四旋翼智能避障空中机器人 | 下一篇:多旋翼式架空线路巡检机器人 |